Физика: Универсальный справочник
Свободные колебания - Механические колебания и волны - МЕХАНИКА
Свободные колебания (или собственные колебания) — это колебания колебательной системы, совершаемые только благодаря первоначально сообщенной энергии (потенциальной или кинетической) при отсутствии внешних воздействий.
Потенциальная или кинетическая энергия может быть сообщена, например, в механических системах через начальное смещение или начальную скорость.
Свободно колеблющиеся тела всегда взаимодействуют с другими телами и вместе с ними образуют систему тел, которая называется колебательной системой.
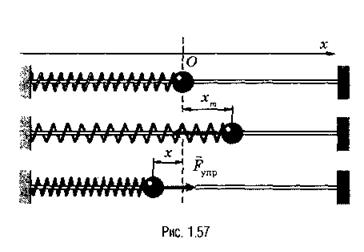
Например, пружина, шарик и вертикальная стойка, к которой прикреплен верхний конец пружины (см. рис. 1.57), входят в колебательную систему. Здесь шарик свободно скользит по струне (силы трения пренебрежимо малы). Если отвести шарик вправо и предоставить его самому себе, он будет совершать свободные колебания около положения равновесия (точки О) вследствие действия силы упругости пружины, направленной к положению равновесия.
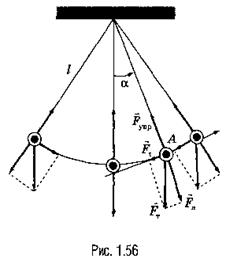
Другим классическим примером механической колебательной системы является математический маятник (см. рис. 1.56). В данном случае шарик совершает свободные колебания под действием двух сил: силы тяжести и силы упругости нити (в колебательную систему входит также Земля). Их равнодействующая направлена к положению равновесия. Силы, действующие между телами колебательной системы, называются внутренними силами. Внешними силами называются силы, действующие на систему со стороны тел, не входящих в нее. С этой точки зрения свободные колебания можно определить как колебания в системе под действием внутренних сил после того, как система выведена из положения равновесия.
Условиями возникновения свободных колебаний являются:
1) возникновение в них силы, возвращающей систему в положение устойчивого равновесия, после того как ее вывели из этого состояния;
2) отсутствие трения в системе.
Динамика свободных колебаний
Колебания тела под действием сил упругости. Уравнение колебательного движения тела под действием силы упругости Fynp (рис. 1.57) может быть получено с учетом второго закона Ньютона (F = mа) и закона Гука (Fynp = - kx), где m — масса шарика, а — ускорение, приобретаемое шариком под действием силы упругости, k — коэффициент жесткости пружины, х — смещение тела от положения равновесия (оба уравнения записаны в проекции на горизонтальную ось Ох). Приравнивая правые части этих уравнений и учитывая, что ускорение а — это вторая производная от координаты х (смещения), получим:

Это дифференциальное уравнение двиения тела, колеблющегося под действием силы упругости: вторая производная координаты по времени (ускорение тела) прямо пропорциональна его координате, взятой с противоположным знаком.
Колебания математического маятника. Для получения уравнения колебания математического маятника (см. рис. 1.56) необходимо разложить силу тяжести FT = mg на нормальную Fn (направленную вдоль нити) и тангенциальную Ft (касательную к траектории движения шарика — окружности) составляющие. Нормальная составляющая силы тяжестиFп и сила упругости нити Fупр в сумме сообщают маятнику центростремительное ускорение, не влияющее на величину скорости, а лишь меняющее ее направление, а тангенциальная составляющая Ft является той силой, которая возвращает шарик в положение равновесия и заставляет его совершать колебательные движения. Используя, как и в предыдущем случае, закон Ньютона для тангенциального ускорения mаt = Ft и учитывая, что Ft = - mgsin α, получим:
![]()
Знак минус появился потому, что сила и угол отклонения от положения равновесия а имеют противоположные знаки. Для малых углов отклонения sinα ≈ α. В свою очередь, α =s/l, где s — дуга ОА, I — длина нити. Учитывая, что at = s", окончательно получим:

Вид уравнения (1.55) аналогичен уравнению (1.54). Только здесь параметрами системы являются длина нити и ускорение свободного падения, а не жесткость пружины и масса шарика; роль координаты играет длина дуги (т. е. пройденный путь, как и в первом случае).
Таким образом, свободные колебания описываются уравнениями одного вида (подчиняются одним и тем же законам) независимо от физической природы сил, вызывающих эти колебания.
Решением уравнений (1.54) и (1.55) является функция вида:
![]()
То есть координата тела, совершающего свободные колебания, меняется с течением времени по закону косинуса или синуса, и, следовательно, эти колебания являются гармоническими (рис. 1.58).
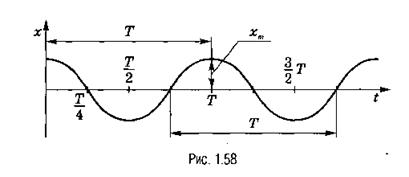
В уравнении (1.56) хт— амплитуда колебания, ωo— собственная циклическая (круговая) частота колебаний.
Циклическая частота и период свободных гармонических колебаний определяются свойствами системы. Так, для колебаний тела, прикрепленного к пружине, справедливы соотношения:

Собственная частота тем больше, чем больше жесткость пружины или меньше масса груза, что вполне подтверждается опытом.
Для математического маятника выполняются равенства:
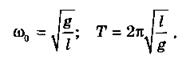
Эта формула была впервые получена и проверена на опыте голландским ученым Гюйгенсом (современником Ньютона).
Период колебаний возрастает с увеличением длины маятника и не зависит от его массы.
Следует особо обратить внимание на то, что гармонические колебания являются строго периодическими (т. к. подчиняются закону синуса или косинуса) и даже для математического маятника, являющегося идеализацией реального (физического) маятника, возможны только при малых углах колебания. Если углы отклонения велики, смещение груза не будет пропорционально углу отклонения (синусу угла) и ускорение не будет пропорционально смещению.
Скорость и ускорение тела, совершающего свободные колебания, также будут совершать гармонические колебания. Беря производную по времени функции (1.56), получим выражение для скорости:

где vm = ωoхm — амплитуда скорости.
Аналогично выражение для ускорения а получим, дифференцируя (1.57):
![]()
где avm = ω2oхm — амплитуда ускорения. Таким образом, амплитуда скорости гармонических колебаний пропорциональна частоте, а амплитуда ускорения — квадрату частоты колебания.